Can Virtualization Help Future-Proof the Next Generation of Avionics Systems?
A new era of avionics systems development is being enabled by an expansion in embedded virtualization and new approaches to meeting airworthiness requirements for future software-defined navigation technologies.


A new era of avionics systems development is being enabled by an expansion in embedded virtualization and new approaches to meeting airworthiness requirements for future software-defined navigation technologies.
Aerospace systems integrators and manufacturers are looking to use future-proofing concepts such as virtualization to build more flexibility into aircraft systems architectures. Engineering leadership from three companies — Core Avionics, Wind River, and Intel’s Internet of Things (IOT) division, Industrial — provided perspectives during the June 18 webinar “What, Why and How of Application Portability for Aerospace Systems.”
Jyotika Athavale, lead engineer for Industrial, said her company is researching and developing the challenge of providing flight safety certification data evidence to achieve certification for the type of advanced flight and engine control technology they’re seeing demand for to support future aircraft configurations.
“We’re looking at the needs for smart air transport,” said Athavale. “UAVs carrying people and cargo is a major trend coming in the next three to five years. Looking at the needs of those systems, for their safety critical systems, looking at deep learning accelerators and the complexity of those systems and what are the safety architecture and evidences we will need to meet the needs for these emerging eVTOL and UAV markets, is the next step in what we’re currently exploring.”
The flashier side of future commercial aerospace platforms, such as unmanned electric-powered air taxis designed to provide aerial relief to traffic-choked cities, has dominated mainstream and aerospace industry trade publications throughout 2019. However, little to none of that coverage has analyzed what will actually have to happen for the flight control systems of such aircraft to achieve certification based on the standards and airworthiness requirements applied to avionics currently in service.
As the next generation of air taxis moves closer to becoming a reality, companies are already building fly-by-wire systems for such aircraft. At the 2019 Uber Elevate Summit, Honeywell Aerospace discussed its new fly-by-wire system for urban air mobility. The system is designed to support the ability of manufacturers building the actual air taxi airframes to design their own flight control laws capable of determining how the aircraft will navigate. Honeywell’s system is a generic piece of hardware and software that has the necessary algorithms, using an automatic code generator, to translate and transmit those laws to control motors.
Athavale, during the webinar, discussed how the growth in complexity of embedded processing in combination with demand for next generation avionics from air taxi and drone manufacturers. One of the biggest challenges facing avionics makers as they build systems for these new vehicles will be how to account for a natural increase of random hardware and software failures associated with the deployment of more advanced functionality such as artificial intelligence.
“Given the growing complexity of our multicore [system on chip] SOCs going forward, we expect to see the hardware and software complexity to grow at a factor of 20 in the next few years,” Athavale said. “That, together with technology scaling will cause an increased risk of failures, so we will see higher failures in hardware and an increased number of software bugs.”
Civil aviation regulatory authorities define the functional safety of embedded safety critical avionics systems as the absence of unreasonable risk due to hazards caused by the malfunctioning behaviors of electronics systems. According to Athavale, as new smarter capabilities are introduced, new avionics systems will increasingly face new certification challenges.
Among them, Athavale highlighted demonstrating worst-case execution times, deterministic behavior of modular intellectual property, sharing memory between multiple applications running concurrently and sharing cache, leading to an increased number of cache misses and delays.
When developing next-generation engine and flight control systems that need to meet design assurance level A requirement — the most stringent in aviation — Athavale said Intel recommends using modular redundancy and dissimilar architectures for embedded processing chains.
As Intel prepares for the growth in hardware and software complexity, the use of a new safety critical driver, Vulkan, is providing a major advancement in the way avionics applications are responsible for more functionality in the future virtualized world of development.
Vulkan is an application programmable interface open standard managed by the Khronos Group, based on the OpenGL SC 2.0 standard, which was first published in 2016. Prior to the release of that standard, which is still seeing slower adoption within the avionics industry, the majority of avionics graphics were developed using OpenGL SC 1.0, which was based on fixed function graphics. OpenGL SC 2.0 is optimized for programmable graphics, according to Steve Viggers, vice president of research projects at CoreAVI.

Viggers said Vulkan has the ability to push computing workloads into an associated graphics processor unit (GPU) to give an application more control over the actual functionality of the GPU itself. A GPU is a programmable and powerful computational device with hundreds of cores that can rapidly manipulate memory to create images in a frame buffer intended for output to a display device.
Many avionics suppliers such as California-based Aitech Defense Systems, Inc. are already using GPUs within their machine-learning software libraries such as Aitech’s A176 Cyclone.
“Vulkan is really about giving the application as much control over the GPU to achieve the performance that it wants,” Viggers said. “With Vulkan, the work that the application has to do is much much larger, the driver has a thin layer and a wider application programmable interface that gives the application explicit control over the GPU itself. This allows the app to tailor the use of the driver specifically to their use case.”
The use of Vulkan in this way has also introduced a set of responsibilities for applications, including synchronization for multi-threading, memory management, input validation and error checking. Vulkan also assigns responsibility to the application for enumerating physical devices, creating logical devices and also ensuring that the information being transmitted to the driver is valid and accurate.
A comparison of the workload an application would experience under the legacy Open GL SC 1.0 standard compared to what experiences under 2.0 with Vulkan is an exponential leap in application responsibility.
“If you’re looking to draw a single triangle on a screen using Open GL, in the application that’s going to be about 100 lines of code. To draw that exact same triangle using the Vulkan APi, that’s over 1,000 lines of code. The application layer is responsible for setting up everything,” Viggers said.
But this is exactly the type of application that will enable avionics software to become flexible and easily upgradeable into the future, giving systems integrators the ability to add artificial intelligence and machine learning.
CoreAVI first introduced its Vulkan driver to the avionics embedded world in late 2018, with its first major industry selection coming in the form of developing the external vision system for NASA’s X-59 Quiet SuperSonic Technology (QueSST) low boom demonstrator aircraft. Several months after Vulkan saw its first avionics adoption, Wind River introduced the new Helix Virtualization platform, combing its existing commercial real-time operating system and embedded Linux distribution into a new software development system.
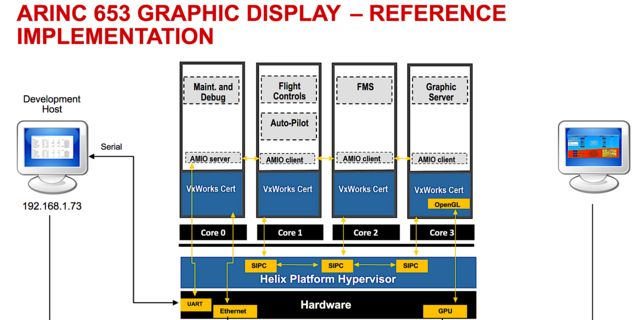
Helix is Wind River’s answer to future-proofing avionics systems, by allowing legacy VxWorks and Linux software to run alongside new applications with the use of time and space partitioning, virtualization and the consolidation of mixed safety and non-safety-criticality workloads on a single edge computing platform.
Olivier Charrier, Wind River’s principal functional safety specialist, said the goal for introducing Helix to the avionics development world is to provide a platform for increased portability of aircraft systems applications into the future.
“The idea is to move the abstraction level of the application for portability to a level where you can abstract completely the application from the hardware. That’s where we enter the world of software-defined systems,” Charrier said.
As future air taxi development programs enter more advanced flight testing campaigns, the use of Helix can provide the type of development framework that will allow engineers to add new functionality and applications at a lower cost. The Helix framework takes Wind River’s Hypervisor and uses it as a bridge between multiple processing cores and a mix of avionics-specific real time operating systems with guest operating systems such as Windows or Android. On top of this platform, applications such as artificial intelligence workloads can be developed and added to the entirety of the system at a lower cost.

Charrier believes Helix and the use of virtualization will enable a new development framework between avionics component suppliers, systems integrators and application developers in the near future.
“The application developer will have it easy,” Charrier said. “He is developing an application on top of a standard or one abstraction layer that will be integrated by a systems integrator on the computing platform. Then the platform supplier has the key role in looking at the interaction differences and interferences and constraint of putting together guest operating systems and hardware configuration to control all of this.”




